
由机械工程学院/机器人工程学院野狼队联手机械工程学院/机器人工程学院团委、学生会举办的广城理机甲对抗赛将于2023-2024学年第二学期初进行比赛。本次比赛致力于培养同学们创造性思维,促进团队协作,加深知识,鼓励科技创新。
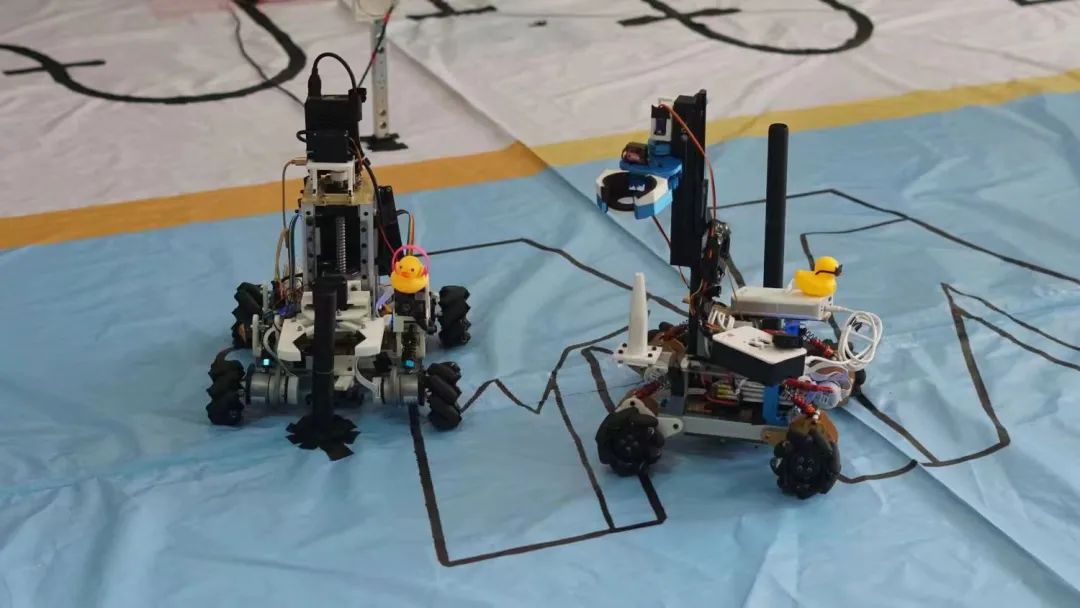
2024广城理机甲对抗赛主题为“智能战创”,比赛要求参赛队每组自行设计一个可移动、可夹取,发射的机器人,比赛过程中,机器人在各自起始点开始前进,前进过程中需完成起伏路段,狭窄路段,更快到达“九宫格任务”区域,而后通过视觉识别属于己方的弹丸,在九宫格区域占领格子,并将弹丸转移到发射机构上,击打到圆柱上的圆台解锁物资大球,推入己方球门,通过完成任务的质量争夺更高分。
比赛采用任务完成度以及积分制度,完成相应的技术动作可获得对应的技术分值,
比赛结果根据优先任务完成度与积分高低统一决定。
为了对本次比赛进行具体说明,我们将召开说明宣讲会。
宣讲会时间地点:2024.12.24(周日)晚7点
A5-101
下图为比赛报名二维码,欢迎全校同学积极报名


以下为机械工程学院/机器人工程学院野狼队队伍介绍以及本次比赛具体规则


广城理机器人野狼队:隶属于机械工程及机器人工程学院,成立于2017年6月20日,致力于机器人本体,控制系统,传感,通信,系统集成等研究方向。队内参与ROBOMASTER机甲大师超级对抗赛,ROBOCON全国大学生机器人大赛。
ROBOMASTER机甲大师超级对抗赛:
2023赛季超级对抗赛全国二等奖
2022赛季超级对抗赛全国一等奖
2021赛季超级对抗赛全国二等奖
ROBOCON全国大学生机器人大赛:
2023ROBOCON吴哥之花全国亚军
2022ROBOCON同创辉煌全国一等奖
2021ROBOCON投壶行殇全国二等奖
加深知识: 通过参与比赛,学生将深入了解机械、电子、编程等多个领域的知识。比赛将成为一个学术探索的平台,拓展学生对这些领域的理解。
鼓励科技创新:我们鼓励学生在比赛中尝试新的理念、技术和方法,推动科技创新。这有助于培养他们在未来面对科技挑战时的创新精神。
2024广城理机甲对抗赛主题为“智能战创”,比赛要求参赛队每组自行设计一个可移动、可夹取,发射的机器人,比赛过程中,机器人在各自起始点开始前进,前进过程中需完成起伏路段,狭窄路段,更快到达“九宫格任务”区域,而后通过视觉识别属于己方的弹丸,在九宫格区域占领格子,并将弹丸转移到发射机构上,击打到圆柱上的圆台解锁物资大球,推入己方球门,通过完成任务的质量争夺更高分。
比赛采用任务完成度以及积分制度,完成相应的技术动作可获得对应的技术分值,
比赛结果根据优先任务完成度与积分高低统一决定。
1. 操作手只能由本参赛队成员担任;
2. 每局比赛结束后,可向裁判申请更换操作手;
3. 操作手应在比赛开始前佩戴由己方准备或组委会提供的护目镜,且在比赛结束或更换操作手前不得摘下护目镜。
参赛队员主要由,电控,机械,视觉,硬件组成,各队可以根据需求,在完成比赛的前提下,可随意更改各方面人数,组委会不做要求。
参赛队伍自行制作和开发参赛机器人,每支参赛队制作一台机器人,比赛过程中不得借用非本队机器人进行比赛。参赛队伍机器人形态在不超出规定尺寸内不作限制,可由参赛队伍自行设计。
1. 参赛队只能使用电池和弹性力作为能源。
2. 供电系统包含多个电路的实测电压不得超过42V。
3. 禁止使用任何高危险性能源,电池总容量不得超过200Wh,供电电压不得超过30。
1. 不得分裂为子单元
2. 机器人重量不可超过12KG
3. 机器人投影至地面尺寸不得超过比赛过程变形尺寸不得超过400mm*400mm*500mm(长*宽*高)
4. 比赛过程中机器人变形尺寸不超过450mm*450mm*550mm
1.机器人可以由操作手通过无线操作,允许使用Wi-Fi,Zigbee及BLE
2.组委会不监督Wi-Fi,Zigbee和BLE的环境。
3.机器人在自动任务区需自动完成全部任务,参赛队员不能使用任何通讯设备与机器人进行通讯,遥控器需放在指定区域。
1. 机器人不得包含有包含有破坏,污染场地的设计元素
2. 机器人设计和制作不应对场馆里任何人员造成危险,不应造成对方机器人和比赛场地的破坏
3. 所有机器人上必须安装硬件急停按钮,禁用爆炸物,明火或危险化学品,储压器,铅酸蓄电池
4. 在设计和使用激光或红外光源时,必须充分注意在全过程中保护场馆内所有人不受伤害(仅允许2级以下激光产品使用)
5. 如果使用射频传输信号,必须设计电路和机构,确保在连接中断时导致失控或危险运动
6. 如果有多个供电系统,参赛队必须设计电路和机构,无论失电还是打开电源的顺序都不导致失控或发生危险运动
7. 为了避免因电机堵转等过载而起火或冒烟,必须在电路上安装适当的限流装置
8. 电线,接插件,端子等的额定电流应等于或高于假定最大电流
9. 机器人的设计者,参赛队对其机器人的安全性负有责任,参赛者应当与组委会密切合作,以确保比赛最大限度地安全
10. 机器人应保证外观美观,无裸露线材,各小队应自制“护甲”用来遮挡其驱动板等物品。
场地尺寸为 4.6M×4.6M(长×宽)的矩形,场地中心对称,一场比赛有两支参赛队,分成红队和蓝队同时上场
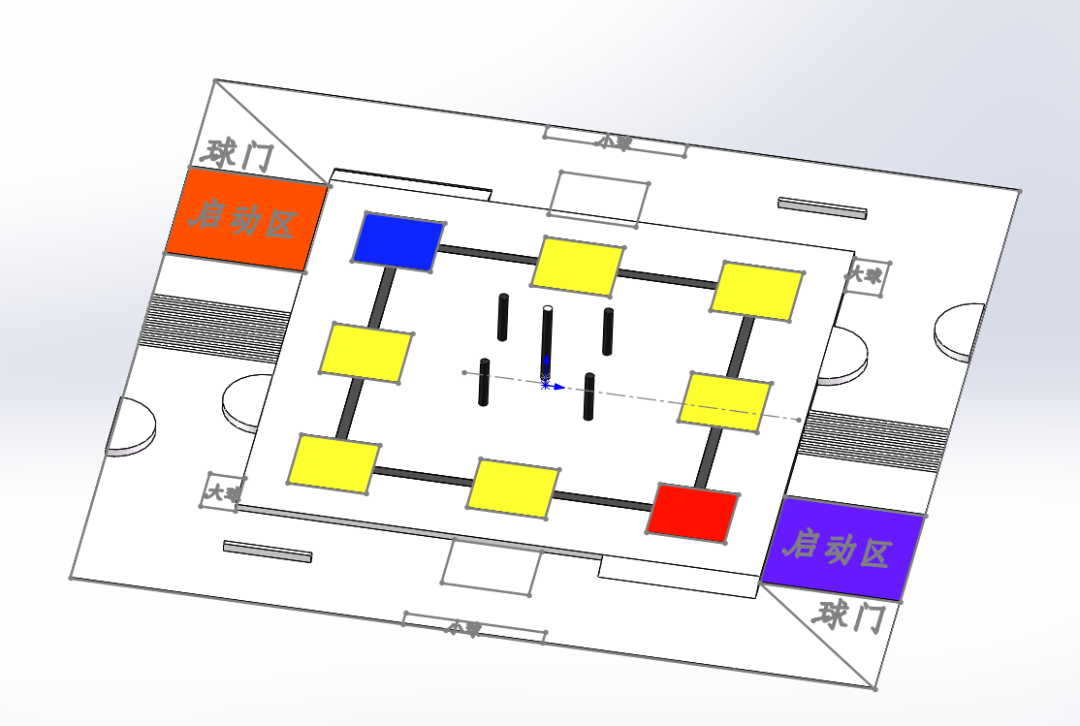
战场具体参数详见附录(sw战场模型)
壹:该地为一个高五厘米的“九宫格”高台,各方仅有一个方格可供机器人由缓坡到达高低,可通过机械结构,走其他方格的台阶以更快的速度到达任务区域。每个方格的中间区域为可占领区,机器人可通过在该区域 静止5s启动机关占领该区域。
贰:该区域为地面任务区,该区主要考察车辆基本功能和结构合理性,其中完成多种关卡来为后面的高台争夺获取优势。
①:该区域为双方启动区,比赛开始前,机器人需要放置在启动区内并将机器人的正 X 轴方向面朝任务一方向(机器人在地面的垂直方向投影不得超过启动区的内边线),区域内可手动调整机器人。
②:该区域为任务二启动区/识别区,任务一终止区,任务二开始时机器人需要放置在该区域内并将机器人的正 X 轴方向面朝弹丸区,随后机器人视觉自动识别进行任务二(机器人在地面的垂直方向投影不得超过启动区的内边线),区域内可手动调整机器人。
③:任务三启动区/高台重置区,己方保护据点,在该区域停留五秒后,该据点被占领任务三随之开始,该区域固定保护,不可被对方占领。
④:据点占领区,该区域为中立争夺区,双方可自行占领该区域先落位的一方具有占领保护,详见比赛判罚。
⑤:射击区,该区域有五个圆柱对称分布,外圈四根矮柱,内圈一根高柱,圆柱上有固定的圆台标靶: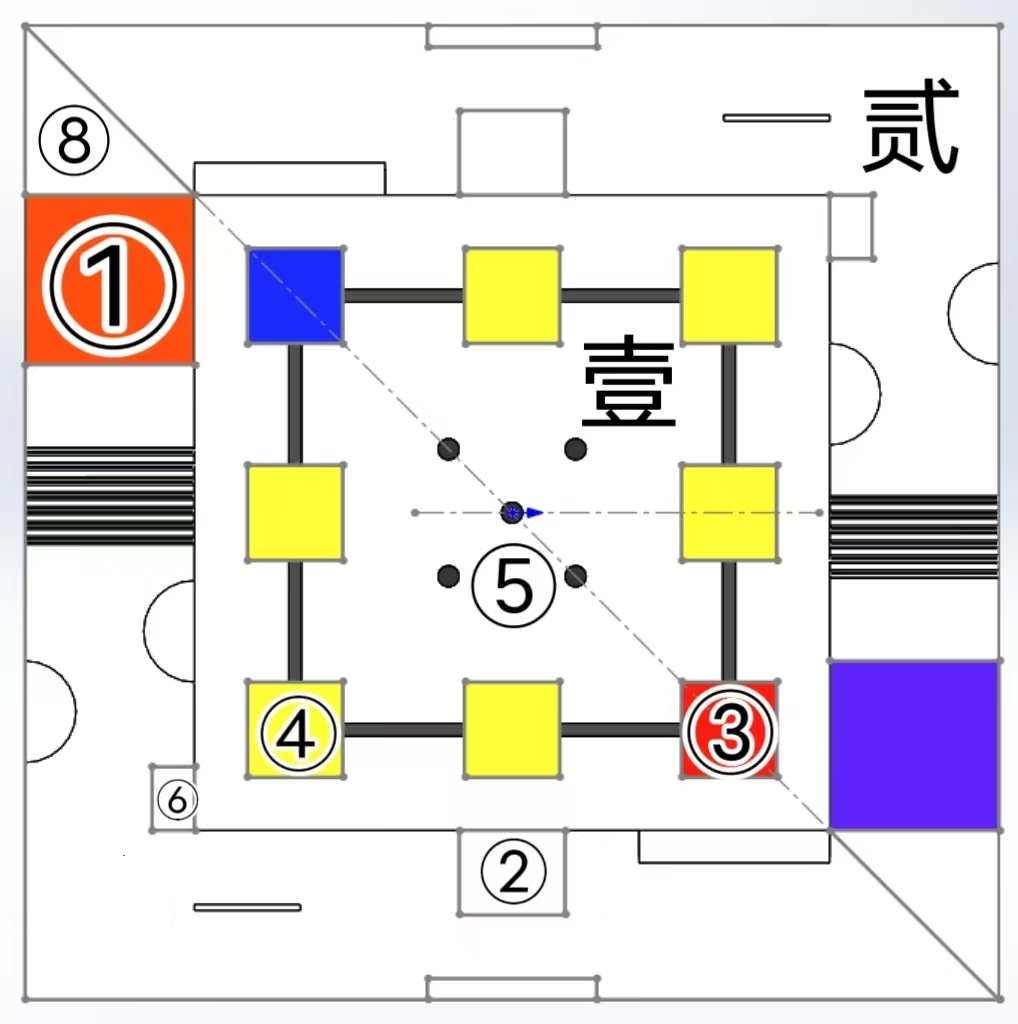
⑥:物资大球区/任务五重置区,机器人推动大球走过障碍区,大球滚出场外则在该区域重置
⑧:球门区/比赛终止区,机器人将物资大球区的大球推入球门,比赛随即结束。
开始比赛前会进行机器人检录,具体检录内容有:
1. 机器人正常运动
2. 机器人安全性检查
3. 机器人尺寸,重量
第1,3点未通过可以正常参加比赛,但比赛技术得分减半;
第2点未通过则禁止其进入比赛场地,其安排好的比赛默认判负。
已通过检录的队伍不可在比赛期间修改赛车结构,如要进行修改需请示裁判。
1. 比赛总时长为5分钟;
2. 比赛准备时间为1分钟
3. 每轮比赛单局开始前每支队伍具有一次技术暂停机会,暂停时间为2分钟,技术暂停时,双方都可以调试己方车辆。
任务一:赶赴战场
红蓝双方机器人从各自启动区出发,完成障碍任务到达“子弹”获取区,如果离开赛道,可向裁判申请复位,裁判同意后,将机器人重置到启动区重新开始任务一。
得分:
1. 该任务总计4分,每重置一次减1分;
2. 如果得分得到0分,默认放弃任务一,将机器人摆放在任务二启动区,开始进行任务二。
任务二:获取子弹
在接地的圆形凹槽中,摆放颜色形状相同的弹丸5颗,随机摆放在5个凹槽中;每局,完成任务一后可以手动更改机器人在任务二启动区的位置,每个凹槽上方有小灯,会随机发出蓝色和红色两种颜色,识别本方颜色的小灯,然后通过视觉识别控制巡线或半自动走到对应弹丸前方,裁判认定到达位置后手动进行夹取和存放的操作(该弹丸被取走后该位置的小灯不会熄灭,),若冲出任务区域,向裁判申请后重置机器人到任务二启动区,根据自身需求可反复进行任务二取得更多球后进行任务三。
如有雷达等不能识别颜色的传感器应提前向裁判说明,裁判会将弹丸放在地上(5颗),取消连续拿球的技术分。
得分:
1. 本关总计15分,识别正确并夹取成功加2分,每局比赛有且仅有五个己方颜色弹丸可供获取;
2. 若连续夹取成功,则该次夹取进行中所有弹丸积分计3分;
3. 若成功获取非己方弹丸,则每弹丸计3分。
任务三:据点占领
完成任务二后,手动前往任务三启动区,在任务三启动区可选择手动或者巡线半自动到达“九宫格”区域除中间外任意一格的占领区,占领五秒后占领区灯光亮起则该区域为己方占领区域,占点成功来完成该项任务,第一次占领点位,必须先占领本方颜色的占领区,不允许重复占领已占领区。
操作手拿起机器人控制器,手动控制完成任务。
(巡线)操作手更改机器人为巡线模式,机器人自动按照设定路线到达占领区后停止,完成站点任务。
操作手更改机器人为半自动模式,机器人自动到达占领区后停止,完成占点任务。
根据自身需求可反复进行任务三占领更多据点以得到更多积分(不允许连续占领同一个格子),两车同时到达一个格子如不发生碰撞则先占领的一方获得所有权,另一方需要在三秒内离开该格,不得前往对方占领的格子。
得分:
1. 该关总计12分;
2. 据点可以无球占领,手动占领1分,巡线占领2分,半自动占领3分;
3. 双方至多占领4个据点,据点不可重复占领;
4. 不可在对方据点停留时间超过5s,如若超过5s,则每过五秒减0.5分,最终得分若含有小数则舍去(例:A队该局得分为4.5分,则该队本任务最终得分为4分)
任务四:火力压制
完成任务三后,自动或手动控制机器人将拿到弹丸转移给机器人的发射机构,机器人站在占领区域任意位置,击打中间的三个高柱上的物体,射中则完成该任务。
(手动)操作手可以拿起机器人控制器,手动控制机器人完成任务四。
(半自动+100%得分)操作手可以拿起机器人控制器,控制机器人到占领区任意位置,放下遥控器开始半自动发射。如该机器人只存在2D雷达等传感器,允许只击打柱子,不必击打高柱上的物体。
如该次发射没有将球体击落,自行移动到其它占领格子,重新开始任务四,故不能连续两次发射在同一个格子。
得分:
1. 成功击打到四角柱计3分,击打中间柱计6分;
2. 若三发内击中两球以上,则第二次命中后获得后续每次击打得分+2的得分增益。
3. 对角格子为得分增益区,在该区域内击打柱子将获得150%的得分增益。
4. 得分增益只可生效一种,获得第二种增益时,第一种增益将会消失。
5. 自动得分= 手动得分x150%
任务五:搬运物资
完成任务四后,己方物资大球解锁,操作手进行手动控制,从台阶抄近路,或者走坡绕路前往物资大球区域通过自制的机械结构(不可破坏球体或者粘住球体表面)推到己方基地,经裁判确认后回到启动区完成该局比赛。完成任务四后,己方物资大球解锁,操作手进行手动控制,从台阶抄近路,或者走坡绕路前往物资大球区域通过自制的机械结构(不可破坏球体或者粘住球体表面)推到己方基地,经裁判确认后回到启动区完成该局比赛。
得分:
1. 大球在比赛结束前运到门6分;
2. 机器人或物资大球冲出赛道,则物资大球由裁判归位到物资大球区,机器人自行就近原地回正,可以立即行动;
3. 只能获取己方大球;
双轮积分赛:
比赛采用积分赛制,由组委会直播抽签决定对手,采用BO2赛制,单场比赛获胜则积1分,失败不积分。每支队伍完成两轮比赛后进行排名,确定八强队伍晋级下一轮淘汰赛。
单败淘汰赛:
比赛采用单败淘汰制,小组赛出线的队伍抽签进行淘汰赛,淘汰赛为BO3赛制,决出两只队伍进行“冠亚争夺赛”,四强赛输掉比赛的两只队伍进行“季殿争夺赛”
冠亚争夺赛,季殿争夺赛:
比赛采用BO5赛制的单败淘汰赛,以比赛结果确定最终四强的排位。
1. 一切判罚以组委会判定为准;
2. 机器人各种原因破坏,冲撞比赛场地计情节严重,处以扣分到取消单局比赛判负不等的处罚;
3. 机器人之间相互冲撞分以下几种情况进行判罚;
(1)在手动控制下,机器人各种原因恶意冲撞对方已经稳定占位或处于巡线/半自动模式下的机器人,则该机器人处以当前任务得分取消的判罚,不影响该局正常比赛进度,后续任务仍可继续进行,如若再发生恶意冲撞,则结束本次比赛,判定为对方胜利
(2)在手动控制下,双方均未稳定占位或对方未处于巡线/半自动模式发生碰撞,则对双方机器人处以警告一次。
(3)在巡线/半自动控制下,机器人处于保护阶段,如若对方处于手动控制模式,则但凡发生碰撞,视情节严重,处以回到任务启动区读秒复活到比赛判负不等的处罚。
(4)机器人卡位使得对方机器人冲撞的,则该机器人视为恶意冲撞。
4. 参赛队员必须保持良好的自身形象,不得进行语言辱骂,顶撞裁判,发生肢体冲突,如若发生此类现象视情节严重处以涉事成员驱逐出场到取消该队比赛资格不等的惩罚。
5. 检录完成后,不得随意更改机器人结构,修理机器人需请示裁判(准备时间和技术暂停时可自行进行机器人的修理,但不可改动机器人结构)。
6. 该部分未提到的其他现象,导致赛场裁判认定为犯规的,犯规判罚由组委会局后商讨而定。
7. 不满足组委会判罚的,可以拒绝在成绩确认单上签字,并向组委会进行申诉(每支队伍有且仅有一次申诉机会),若组委会判定合理则该处罚无效,被处以判罚的单场由组委会指定重赛。
胜负条件从前到后的判断依据为
1. 技术得分;
2. 是否完赛(完赛时常);
3. 占领格数;
4. 获取弹丸数量;
5. 任务一重置次数;
若上列条件不能判断,则视为平局加赛一场
胜负条件从前到后的判断依据为
1. 技术得分;
2. 是否完赛(完赛时常);
3. 占领格数;
4. 获取弹丸数量;
5. 任务一重置次数;
若上列条件不能判断,则视为平局加赛一场
进度 | 时间 | 备注 |
报名时间 | 12月20-1月31日 | |
中期审核 | 3月7号 | 审核结束后,将根据审核评分高低给出排名,排名前三名,正式比赛享有3分的比赛中额外技术加分 |
比赛时间 | 3月23日 | 具体比赛时间会在后续版本公布 |
地址:广州市花都区学府路1号广州城市理工学院B6-312 电话:020-36903401 Email:zhuax@gcu.edu.cn
Copyright © 2007-2025 广州城市理工学院 机械工程学院 版权所有制作维护