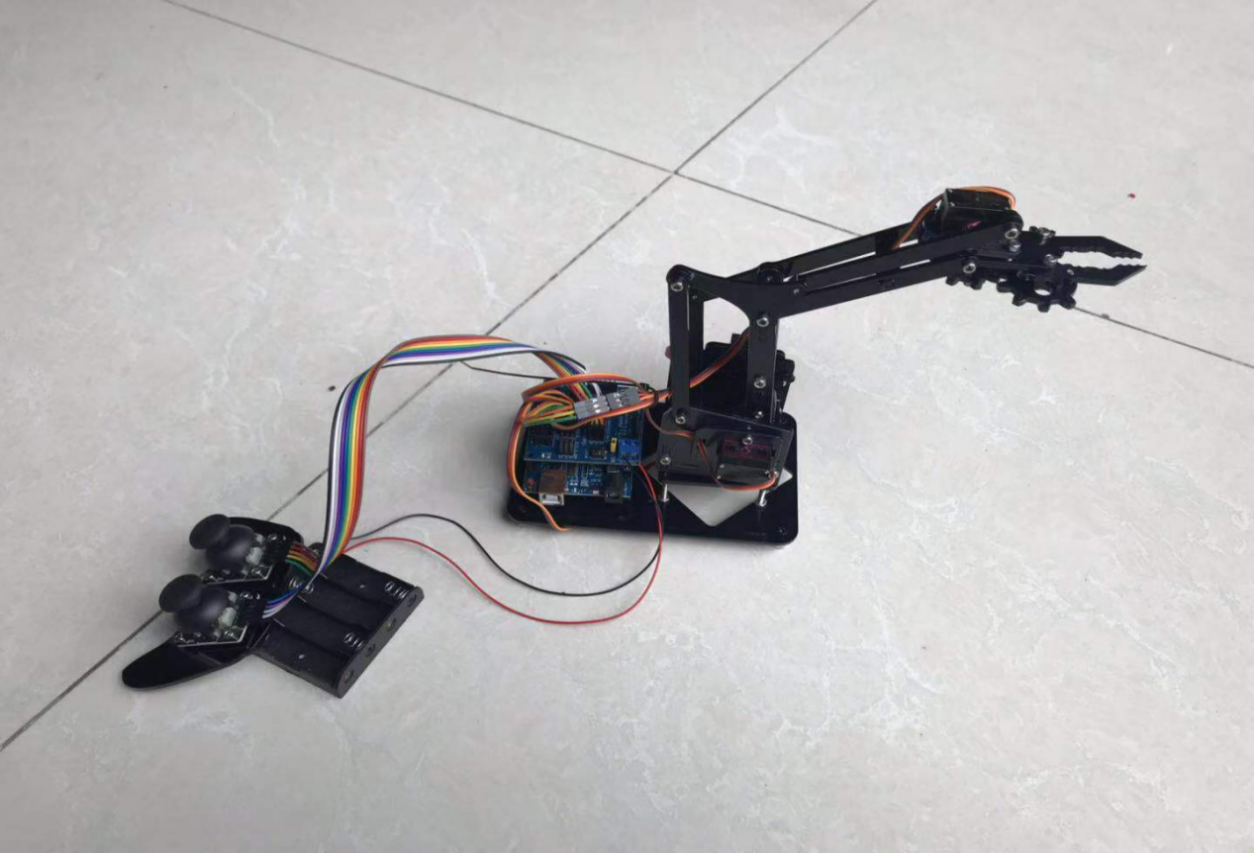
针对生产线上的自动化设计了一个模块工装下线机械手,实现模块下线的自动化。该机械手能实现机械手的伸缩、升降、夹紧和放松等动作。驱动系统采用舵机驱动,实现了手臂的夹紧和放松动作,采用Arduino控制板进行舵机的控制,进而控制关节机械手的上下、左右运动,机械手设手动和自动两种工作方式能,通过转换开关进行工作方式转换。系统设有报警功能,当机械手出现故障时,能及时报警。机械手最终能够按照控制程序的要求实现预期的动作。
地址:广州市花都区学府路1号广州城市理工学院B6-312 电话:020-36903401 Email:zhuax@gcu.edu.cn
Copyright © 2007-2025 广州城市理工学院 机械工程学院 版权所有制作维护